🅳
Dolphin発のイノベーション
研究開発におけるコア・コンピタンス:
-
アクチュエータ単体走査中の落下テスト
-
アクチュエータ走査中の過負荷テスト
-
ハンドヘルド使用に耐え切れる精密モールドで製造したモノリシックLiDARモジュール



LiDARスキャン用アクチュエーター方式の比較
イノベーション
| Dolphinチュエーター | Polygonモーター | MEMSミラー | Risleyプリズム | |
| 基本構造 |  |
 |
 |
 |
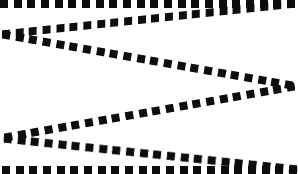
| 駆動原理 | 直線往復走査 弾性磁場内の共振駆動 |
直線片方走査 非弾性磁場のDC駆動 |
直線往復走査 弾性応力の 共振駆動 |
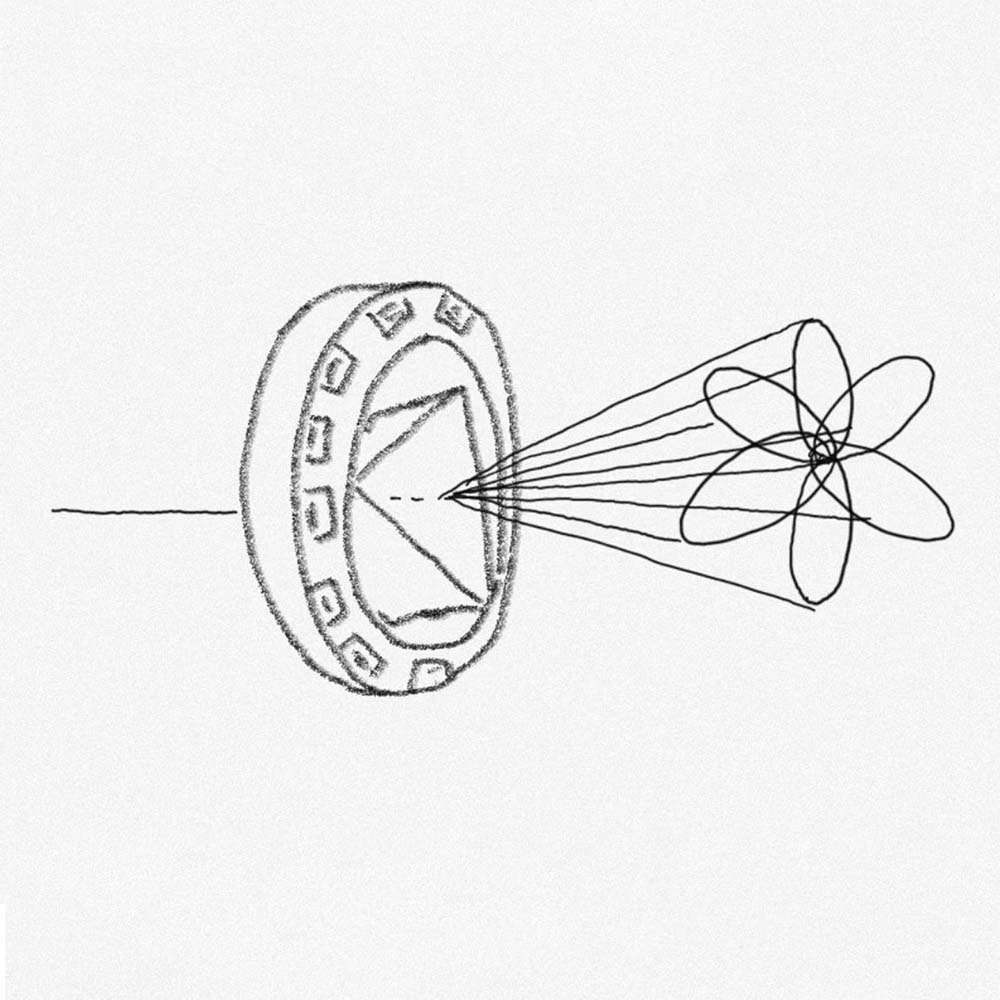
ウェッジプリズムのDC回転の曲線周期軌道 |
| スキャン速度 | 1/2 インチを超える大型ミラーを駆動可能、1 分あたり 10,000 回以上のスキャン | 1/2 インチを超える大型ミラーを駆動可能、 1 分あたり 10,000 回以上のスキャン | ミラー直径 < 3mm のみ、高速駆動可能 | 非均等負荷のプリズムのため、低速駆動のみ |
| 走査角度 | 光学180度を超える広角走査が可能 | 光学180度を超える広角走査が可能 | 光学走査角度が30度未満に限定 |
プリズムの角度に依存し、狭角走査が一般論 |
| 消費電力 | 非常に少ない | 大きい | 大きな走査ミラーが不可のため、同一条件での評価が不可能 | 大きい |
| 開始レイテンシ | 高速 < 0.1 秒 | 数十秒で遅い | 数十秒で遅い | |
| 寿命 | > 10,000時間 | > 10,000時間 | プリズム荷重が非均等のためは評価が不可能 | |
| 2D スキャニング パターン |  水平連続走査+垂直(ガルバノ)離散走査 水平連続走査+垂直(ガルバノ)離散走査 |
水平連続走査+垂直(ガルバノ)離散走査 |
 ダブルトーションスプリング構造による非均等ラスター走査 ダブルトーションスプリング構造による非均等ラスター走査 |
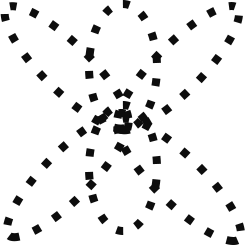 ダブル回転プリズムによる湾曲走査経路 ダブル回転プリズムによる湾曲走査経路 |